Towards an AUV platform for low cost research on localization and autonomy
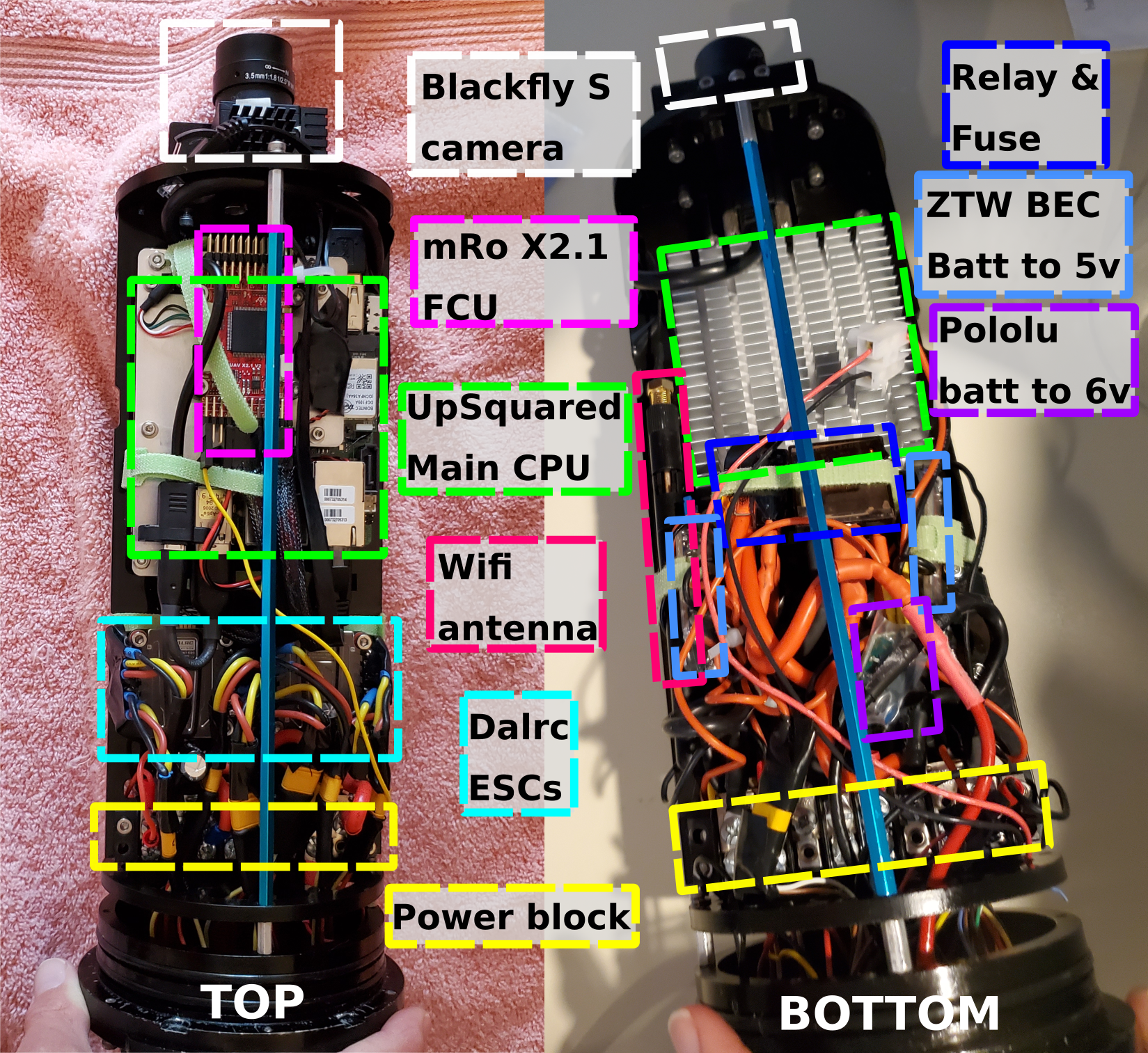
As a part of ongoing research efforts in autonomous underwater robotics, we at the Dartmouth Reality and Robotics Lab and the Autonomous Field Robotics Lab are developing a low cost AUV platform based on the electronics....